2019 call: IT architecture for autonomous vehicle
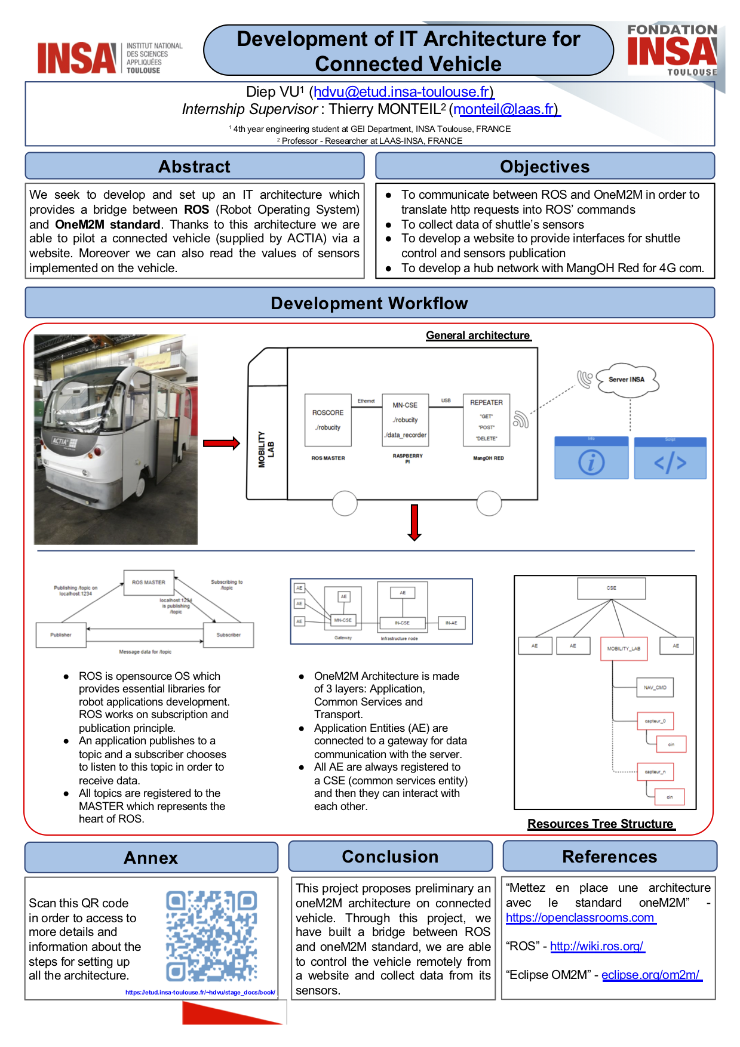
in this project we propose to create an architecture that will serve as a basic structure to host a set of sensors / actuators on the vehicle and on the campus based on the oneM2M standard and OM2M (developed at LAAS-CNRS) allowing standardized access to the services offered by these different devices.
This architecture will include a gateway in the vehicle, a bridge in a building and an accessible instance on the cloud of INSA. Some sensors will be connected to this architecture. The information available on the vehicle via the ROS interface will be inserted into this oneM2M architecture.